

ROS simulating a 3 axis robot in Rviz
22 Apr 2017In this tutorial, we will create an urdf model of a 3 axis robot and simulate it in Rviz.
Create a package inside your workspace (create it if u haven’t any).
mkdir catkin_tutorial
cd catkin_tutorial
mkdir src
cd src
catkin_create_pkg three_axis_robot roscpp rospy urdf
Create a folder named urdf to store urdf models.
cd three_axis_robot/
mkdir urdf
Now create a new file called my_robot.urdf with these data.
<robot name="my_robot">
<link name="base">
<visual>
<geometry>
<box size="2 2 2"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 1"/>
</visual>
</link>
<link name="link1">
<visual>
<geometry>
<box size="0.5 0.5 3"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 1.5"/>
</visual>
</link>
<link name="link2">
<visual>
<geometry>
<box size="0.5 0.5 3"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 1.5"/>
</visual>
</link>
<link name="link3">
<visual>
<geometry>
<box size="0.5 0.5 3"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 1.5"/>
</visual>
</link>
<joint name="joint0" type="continuous">
<parent link="base"/>
<child link="link1"/>
<origin rpy="0 0 0" xyz="0 0 2"/>
<axis xyz="1 0 0" />
</joint>
<joint name="joint1" type="continuous">
<parent link="link1"/>
<child link="link2"/>
<origin rpy="0 0 0" xyz="0 0 3"/>
<axis xyz="1 0 0" />
</joint>
<joint name="joint2" type="continuous">
<parent link="link2"/>
<child link="link3"/>
<origin rpy="0 0 0" xyz="0 0 3"/>
<axis xyz="1 0 0" />
</joint>
</robot>
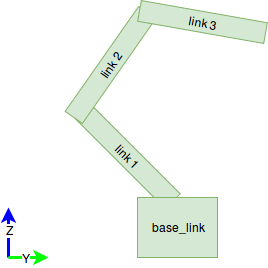
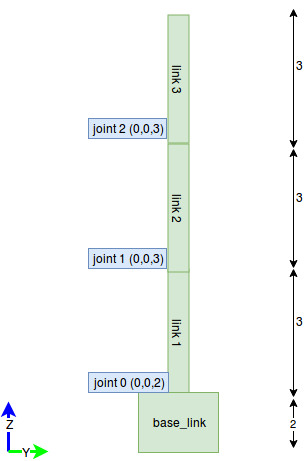
This link will give you a list of all possible tag tags and informations. (Read this before going further. link) There are 4 links and three joints in this robot. Each joint has one parent and one child.
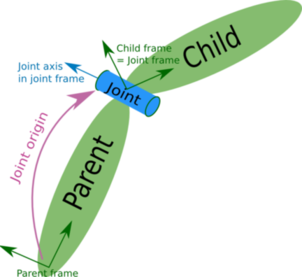
There are different types of joints. Here we used continuous and fixed type. Joint 0 is fixed and the rest of them are continuous. The origin tag inside the
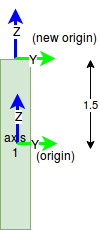
There is also an another origin tag inside link tag. This represent the base frame of the link itself. We need to shift it by 1.5 (half of the link length), other wise rotation will be around the middle part of each link rather than at the joint (This will make sure both the base frame; child and parent coincides).
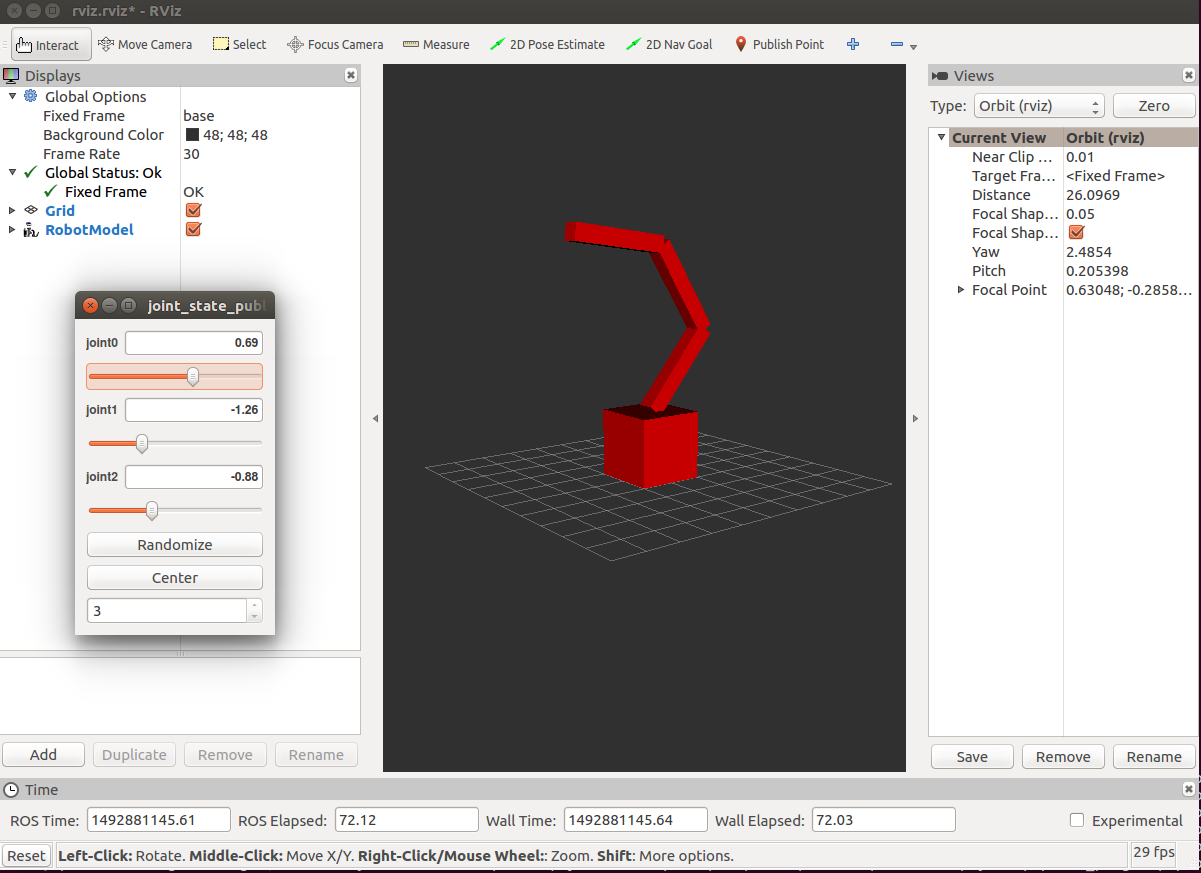
Now create a file called my_robot.launch under launch folder. This will launch joint_state_publisher and robot_state_publisher node. joint_state_publisher node will publish all the joint states. This also has one gui where you can change each joint angles. robot_state_publisher node will take the joint angles of the robot as input and publishes the 3D poses of each links.
<launch>
<arg name="model" />
<param name="robot_description" textfile="$(find three_axis_robot)/urdf/my_robot.urdf" />
<param name="use_gui" value="true"/>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find three_axis_robot)/urdf/rviz.rviz" required="true" />
</launch>
Now create another file called rviz.rviz. (This is not actually needed. This is just a configuration file for Rviz saying that these panels should be there. You can open rviz and add the RobotModel and save the configuration by yourself.)
Panels:
- Class: rviz/Displays
Help Height: 78
Name: Displays
Property Tree Widget:
Expanded:
- /Global Options1
- /Status1
Splitter Ratio: 0.5
Tree Height: 565
- Class: rviz/Selection
Name: Selection
- Class: rviz/Tool Properties
Expanded:
- /2D Pose Estimate1
- /2D Nav Goal1
- /Publish Point1
Name: Tool Properties
Splitter Ratio: 0.588679016
- Class: rviz/Views
Expanded:
- /Current View1
Name: Views
Splitter Ratio: 0.5
- Class: rviz/Time
Experimental: false
Name: Time
SyncMode: 0
SyncSource: ""
Visualization Manager:
Class: ""
Displays:
- Alpha: 0.5
Cell Size: 1
Class: rviz/Grid
Color: 160; 160; 164
Enabled: true
Line Style:
Line Width: 0.0299999993
Value: Lines
Name: Grid
Normal Cell Count: 0
Offset:
X: 0
Y: 0
Z: 0
Plane: XY
Plane Cell Count: 10
Reference Frame: <Fixed Frame>
Value: true
- Alpha: 1
Class: rviz/RobotModel
Collision Enabled: false
Enabled: true
Links:
All Links Enabled: true
Expand Joint Details: false
Expand Link Details: false
Expand Tree: false
Link Tree Style: Links in Alphabetic Order
base:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
link1:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
link2:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
link3:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
Name: RobotModel
Robot Description: robot_description
TF Prefix: ""
Update Interval: 0
Value: true
Visual Enabled: true
Enabled: true
Global Options:
Background Color: 48; 48; 48
Fixed Frame: base
Frame Rate: 30
Name: root
Tools:
- Class: rviz/Interact
Hide Inactive Objects: true
- Class: rviz/MoveCamera
- Class: rviz/Select
- Class: rviz/FocusCamera
- Class: rviz/Measure
- Class: rviz/SetInitialPose
Topic: /initialpose
- Class: rviz/SetGoal
Topic: /move_base_simple/goal
- Class: rviz/PublishPoint
Single click: true
Topic: /clicked_point
Value: true
Views:
Current:
Class: rviz/Orbit
Distance: 50.9065704
Enable Stereo Rendering:
Stereo Eye Separation: 0.0599999987
Stereo Focal Distance: 1
Swap Stereo Eyes: false
Value: false
Focal Point:
X: 0
Y: 0
Z: 0
Focal Shape Fixed Size: true
Focal Shape Size: 0.0500000007
Name: Current View
Near Clip Distance: 0.00999999978
Pitch: 0.355398387
Target Frame: <Fixed Frame>
Value: Orbit (rviz)
Yaw: 2.21039844
Saved: ~
Window Geometry:
Displays:
collapsed: false
Height: 846
Hide Left Dock: false
Hide Right Dock: false
QMainWindow State: 000000ff00000000fd00000004000000000000016a000002c4fc0200000008fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000006400fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c0061007900730100000028000002c4000000dd00fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261000000010000010f000002c4fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a005600690065007700730100000028000002c4000000b000fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000004b00000003efc0100000002fb0000000800540069006d00650100000000000004b00000030000fffffffb0000000800540069006d006501000000000000045000000000000000000000022b000002c400000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
Selection:
collapsed: false
Time:
collapsed: false
Tool Properties:
collapsed: false
Views:
collapsed: false
Width: 1200
X: 345
Y: 105
Now launch the launch file.
roslaunch three_axis_robot my_robot.launch
If you are planning to create a hardware and want to simulate the same, you can create a separate node that will publish joint states instead of using joint_state_publisher node.
Here instead of actual hardware ESP8266 is communicating with ROS and sending joint angles of a 5 axis robot.
You can refer these tutorials to get more in depth knowledge.
https://wiki.ros.org/urdf/Tutorials
https://www.youtube.com/watch?v=g9WHxOpAUns