

13 Nov 2016
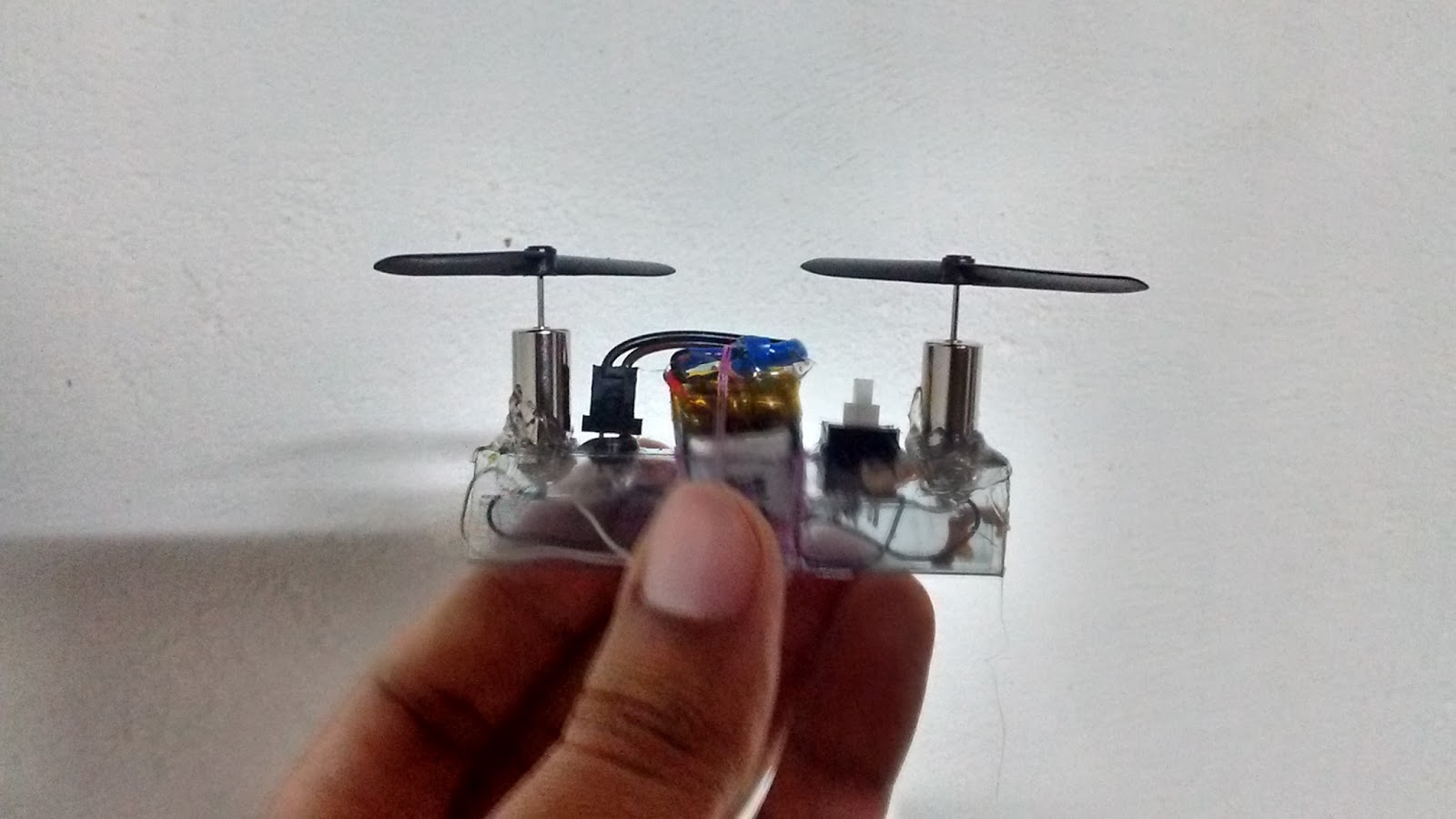
In order to counter the rotating torque from the previous single rotor version, one more propeller is added. The second propeller rotates counter clockwise and both torques will cancel each other (Only if both propellers are rotating at same speed).



