27 Jan 2016
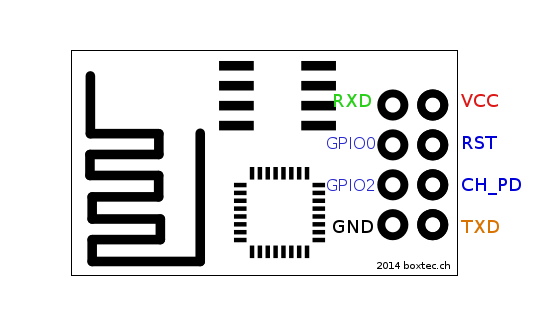
ESP8266 is a cheap WiFi chip you can use in your embedded projects. You can communicate the chip using AT commands through UART. You can setup a WiFi hotspot, connect to an existing WiFi network, act as a web server, send data (TCP/UDP). The real fun is that you can reprogram the whole chip and you don’t need an other micro controller to control it. The ESP8266 ES1 come with 2 GPIO pins. There are other variants of this chip with more GPIO. This ESP 01 cost around Rs. 250 which is so cheap while comparing with other WiFi modules.